Samochód ciężarowy wykonuje skręt w prawo i rozpędza się na prostym odcinku drogi. Wzrasta prędkość obrotowa silnika i coraz szybciej przemykają drzewa za oknami kabiny. Kierowca wyraźnie czuje wibracje powodowane nierównościami nawierzchni drogi. I nie byłoby w tym nic dziwnego, gdyby nie fakt, że wszystkie te odczucia, odgłosy, obrazy są generowane przez komputer!
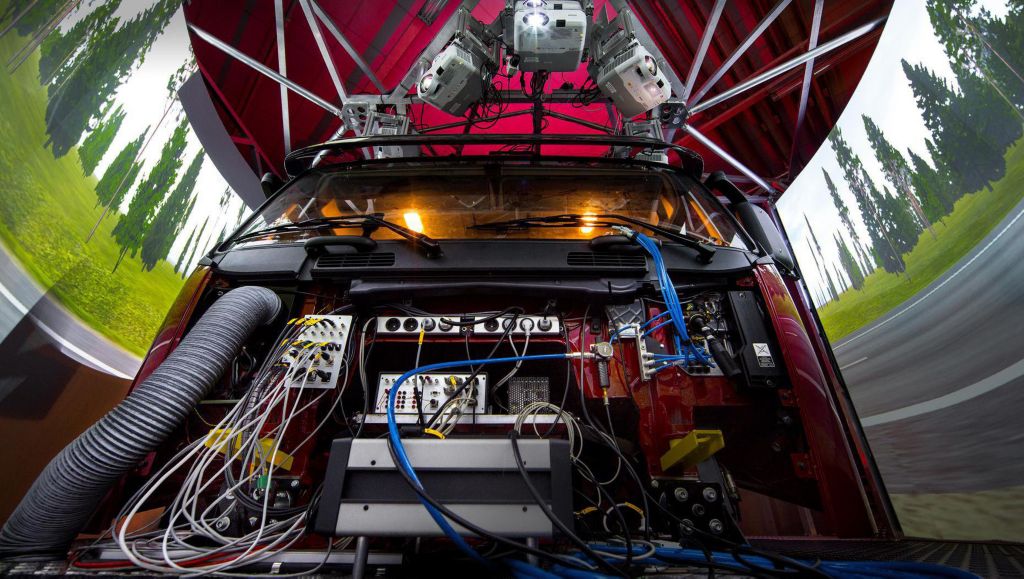
„Zadaniem symulatora jest kreowanie poczucia rzeczywistości. Odgłosy i wrażenia powinny być dokładnie takie, jak w czasie jazdy pojazdem ciężarowym po rzeczywistej drodze – mówi Kristoffer Tagesson, doktorant pracujący w Volvo Trucks.
Prezentowany symulator jazdy, będący własnością VTI (Szwedzki Krajowy Instytut Badawczy Dróg i Transportu), jest uznawany za najnowocześniejszy na świecie. Aktualnie prowadzone badania mają na celu zwiększenie poziomu bezpieczeństwa współczesnych i przyszłych pojazdów. Volvo Trucks jest jednym z wielu partnerów z branży transportowej, którzy z pomocą symulatora dążą do opracowania jak najbezpieczniejszych samochodów ciężarowych.
Testy zderzeniowe są doskonałym narzędziem – są wyjątkowo widowiskowe, a jednocześnie miarodajne, jeżeli chodzi o ocenę wytrzymałości pojazdu podczas zderzenia. Ale bezpieczeństwo ruchu drogowego to coś więcej, niż tylko roztrzaskane szyby i zgnieciona blacha.
– W teście zderzeniowym możemy zobaczyć, co dzieje się w chwili zderzenia – a co zdarzyło się wcześniej? Skąd mamy wiedzieć, czy w krytycznej chwili aktywne systemy bezpieczeństwa nie rozpraszają uwagi kierowcy, tylko mu pomagają? Tutaj szuka się odpowiedzi na takie właśnie pytania – wyjaśnia Kristoffer Tagesson.